Soutenance de thèse de doctorat Mohammad Parhizkar
M. Mohammad Parhizkar soutiendra en vue de l'obtention du grade de docteur en systèmes d'information, sa thèse intitulée:
Higher-order Emergence in Collective AI Systems – from Computational Model of Dictyostelium disciodeum to Swarm Robotics
Date: Jeudi 27 février 2020 à 14h30
Lieu: Centre Universitaire d'Informatique (CUI) – Salle du Rez, Bâtiment A, Route de Drize 7, 1227 Carouge
Le jury de la thèse est composé de :
• Prof. Giovanna DI MARZO SERUGENDO, directrice de thèse, Université de Genève
• Prof. Jean-Henry MORIN, président du jury, Université de Genève
• Prof. Thierry SOLDATI, Faculté des Sciences, Université de Genève
• Prof. Salima HASSAS, Université Claude-Bernard Lyon 1, France
• Dr. José-Luis FERNANDEZ-MARQUEZ, CUI, Université de Genève
Collective behavior in nature provides a source of inspiration to engineer artificial collective adaptive systems, due to mechanisms favoring adaptation to environmental changes and enabling complex emergent behavior to arise from a relatively simple behavior of individual entities. Engineering of the mechanisms for modeling the first-order emergence, also referred to as swarm intelligence, is well studied and identified, such as gradient, repulsion, or ant foraging, but not yet for the second- or higher-order emergence. However, higher-order emergent behavior has not received much attention yet. Second-order emergent behavior arises from the interactions of individuals, which are themselves the result of first-order emergent behavior.
In addition to studying mechanisms for higher-order emergence, we propose in this thesis a method for analyzing and modeling first- and higher-order emergence in collective systems. This method relies on two existing frameworks: the Generic Emergence Framework (GEF) for shaping different levels of emergence and the MASQ quadrants for shaping individual, collective agent behavior. They help us to design agent-based models, in particular, to discriminate first- from second-order behavior, and identify triggers of change (GEF); to identify internal states, individual behaviors, interactions, and emerging properties of both first- and second-order (MASQ).
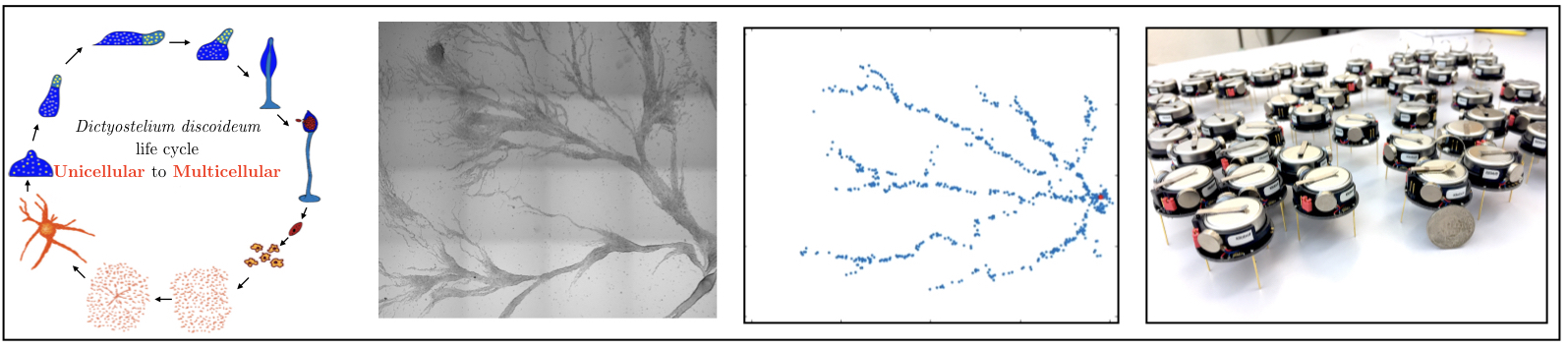
We show how to apply the method, the frameworks, and how to derive agent-based models of both first- and second-order emergence on the specific case of the social amoeba Dictyostelium discoideum. D. discoideum cells are able to change their behavior to survive in response to nutrient starvation. Individual cells move around on their own when there is plenty of food. When food is scarce, cells self-aggregate towards leading, spontaneous center cells (first-order emergent behavior) to build a super-organism, similar to a slug. This super-organism presents a system at a level of complexity more significant than an individual cell, without the complexity of a nervous system. Although the slug’s behavior is due to the collective behavior of the amoebae, it displays properties that none of the cells have on its own (e.g., sensitivity to light and heat). A slug moves as a whole and interacts with other slugs (second-order emergent behavior) looking for a suitable place to transform into a fruiting body, where later the cells resume their individual behavior. Regarding the first-order emergent behaviors, the results show autonomous center selection, streaming, and stream-breaking, new center formation, similar aggregation territories size. Moreover, regarding second-order emergent behaviors, the results exhibit collective movement during the migration phase, slug’s phototaxis, ammonia effect, merging of slugs, or new features as sensitivity to light.
Overall, this thesis proposes a new design pattern “leader-follower”, describing a mechanism for achieving higher-order emergent behavior in artificial systems, derived from D.discoideum behavior. We eventually translate this pattern into swarms of Kilobots. The proposed design pattern and our new agent-based models will help researchers to move forward from traditional swarm intelligence algorithms to the higher-order collective behavior mechanisms.
In general, our computational simulations are able to replicate the behaviors of D. discoideum system it parallels and to do so based on the present, identified characteristics of the system from aggregation until slug formation. To achieve this goal, it is required to model different steps for each phase of D. discoideum life cycle. Overcoming this challenge is possible by experimental, and theoretical studies. These studies cover understanding the implications of the conceptual and main algorithmic steps of the model for each phase (more).
News